飛べないカイコガの羽ばたきはフェロモン分子を美しく導く~カイコガの羽ばたきと匂い追尾の関係を3次元シミュレーションによって解析~
2024年08月05日
研究・産学連携
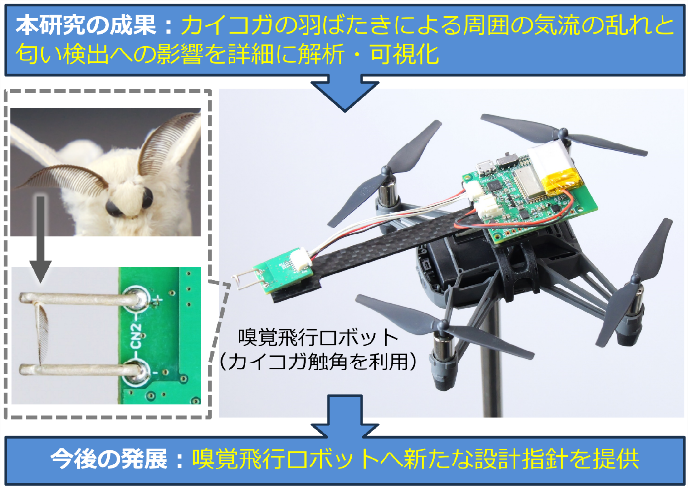
信州大学繊維学部 機械・ロボット学科の照月大悟准教授と千葉大学大学院工学研究院の中田敏是准教授らの研究グループは、昆虫の触角をドローンと組み合わせた嗅覚飛行ロボット(注1)を開発して、匂いの発生源を探索する研究を進めています。本研究では、優れた匂い(フェロモン)検出能力を持つカイコガ(蚕)を対象に、数値流体力学(CFD)解析を行うことで、翅の羽ばたきによる気流誘導メカニズムの詳細を明らかにすることに成功しました。
オスのカイコガは、メスの性フェロモンを高感度・高選択的に検出し、特徴的な匂い源探索行動をとることから、嗅覚研究のモデル昆虫としても長く利用されています。しかし、触角の形態や神経生理学的側面、そして匂い源探索アルゴリズムの研究は行われてきた一方で、カイコガの翅の羽ばたきが周囲の気流をどのように乱し、その気流の乱れが匂い源探索にどのような影響を与えるかについては、ほとんど検討されていませんでした。
そこで研究グループでは、高速度カメラを用いてカイコガの体と羽ばたき運動を測定し、PC内で羽ばたくカイコガを再構築してCFD解析を行い、羽ばたき運動によって生じる気流と、匂い分子の分布の関係を可視化しました。その結果、カイコガの翅の羽ばたきはカイコガ前方の気流を特定の範囲(水平方向から60°以内)から選択的に触角へ誘導することがわかりました。この気流操作が高感度なフェロモン検出と効率的な匂い源探索に有効であることが示唆されました。
環境中の匂いを追跡して迅速に発生源を探索することは、災害下での要救助者探査などに有効です。本研究の成果は、嗅覚飛行ロボットのセンサ 配置や匂い誘導構造の開発に有用な 知見をもたらし、迅速な匂い源探索を行うロボットの実現につながります。
なお、本研究成果は、国際科学雑誌Scientific Reportsに令和6年8月2日に公開されました。
注1. 嗅覚飛行ロボット:昆虫触角(例:カイコガ)と小型ドローンを融合した昆虫-機械ハイブリッド型ドローン。バイオハイブリッドドローンとも呼称する。2021 年に照月准教授らが国際誌にて発表した。文献:D. Terutsuki et al., Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sens. Actuators B Chem. 339 (2021) 12977